Connected Vehicles – Monitoring and positioning accuracy investigations
ContextThe Cooperative Intelligent Transport Initiative (CITI) is a project currently undertaken by Transport for New South Wales (TfNSW) in partnership with Data61|CSIRO and the Australian Federal Government’s Heavy Vehicle Safety Productivity Program. The main goal of the project is to build Australia’s first semi-permanent test-bed for assessing Vehicle-to-vehicle and Vehicle-to-Infrastructure technology, over an area of 917 km2 in the Illawarra Region of NSW south of Sydney [1]. Avoiding traffic collisions in this area would lead to reduced accident costs and opens the possibility for deploying Cooperative Intelligent Transport Systems (CITS) technology, though Dedicated Short Range Communication (DSRC) systems. Currently, sixty vehicles (58 heavy vehicles and 2 light vehicles), three signalised intersections and one roadside location have been equipped with DSRC units. In order to ensure road safety, one of the main challenges of the project is to address the generation of false collision alerts which hinder driving and could result in a mistrust of the DSRC on-board-unit warning device. The first step to identify the possible cause of false alerts is to investigate and understand the accuracy of the transmitted positioning between connected vehicles, as reported from Basic Safety Messages (BSMs).
Heavy Vehicles Positioning Investigation
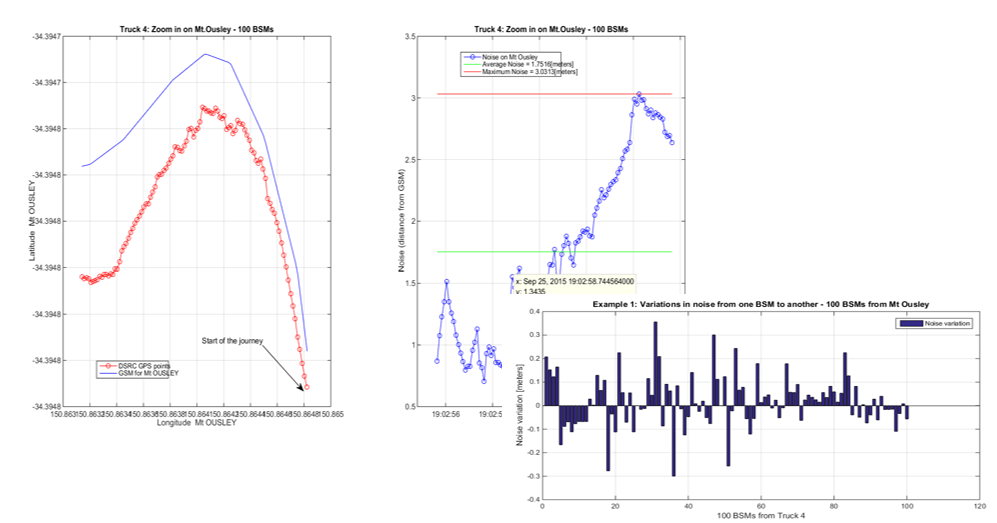
Our current investigations [2] on positoning accuracy for heavy vehicles are focused on:
- investigating and characterising the error (noise) in the DSRC GPS positioning,
- identifying “noise – prone sections” of the road network that would cause high levels of noise to be registered.
- identifying potential factors that would impact noise in the GPS positioning by applying regression analysis and decision trees.
- analyse the transmission of collision alerts during experiments which simulate real-life incidents.
- identify the factors that might hinder broadcasting collision alerts between connected vehicles.
Light Vehicles – Collision Alert Monitoring
Two light-vehicles belonging to TfNSW and equipped with DSRC systems were involved in various test-case scenarios in which the DSRC system sent alert messages to the driver in order to avoid collision between the two cars [3]. The following driving scenarios were tested:
- Forward collision experiment – testing the forward collision avoidance (first car decelerates, second car (following) receives alert messages);
- Forward collision experiment, reversed roles – testing the forward collision avoidance when the roles of vehicles were reversed;
- Unmarked T-intersection experiment –test of collision avoidance at an unmarked T-intersection (low visibility)
- Signal Phase and Timing (SPaT) Equipped intersections demonstration – successful generation of red light alerts based on traffic signal messages received by both connected vehicles.
Our investigation looked at the difference between successful and failed Collision Alerts vehicles and the eternal or internal events which leads to a miscommunication between devices, as well as the implications on the driver safety.
Ongoing and Future Research
We are currently centralising and monitoring the CV activity by building a visualisation platform that would help detect the locations where the DSRC-equipped vehicles are suffering bad positioning accuracies and the reasons why this happens.
We are also looking into building a modelling framework for applying an event-triggered control when the location transmitted by connected vehicles equipped with DSRC is lost due to unforeseen events. Firstly, we model the evolution of the DSRC transmitted positioning as a multi-state stochastic switching system by taking into consideration the distance from the transmitted location to the road centre. A control interval is defined for the evolution of the positioning signal by using the road width to establish the boundaries. Secondly, we propose an analytic method for determining the exit probabilities from the control interval, with the scope of anticipating any position anomalies and help applying the event triggered control in advance rather than when the control boundaries have been already reached. Thirdly, we apply a cooperative location estimation method for improving the broadcast position information by using the accumulating trajectory segments from the moment of the anomaly alert.
Publications
- Tyler Paul, Wall John, and Vecovski Vanessa, CITI- An update on Australia's First Pilot Deployment of CITS, 23rd ITS World Congress 2016 Melbourne.
- Mihaita Adriana Simona, Tyler Paul, Menon Aditya, Wen Tao, Ou Yuming, Cai Chen, Chen Fang, "An investigation of positioning accuracy transmitted by connected heavy vehicles using DSRC", Transportation Research Board 96th Annual Meeting, Washington D.C., January 8-12, 2017.
- Mihaita A.S., Tyler Paul, Wall John, Vecovsky Vanessa, Cai Chen, “Positioning and collision alert investigation for DSRC-equipped light vehicles through a case study in CITI”, ITS World Congress Montreal, October 29 – November 2, 2017.
- Mihaita Adriana Simona, Cai Chen, Chen Fang, Event-triggered control for improving the positioning accuracy of connected vehicles equipped with DSRC, International Federation of Automatic Control World Congress (IFAC WC 2017), 9-14 July 2017, Toulouse, France.
Reports
- Mihaita Adriana Simona, Tyler Paul, "An investigation of Basic Safety Message Position Reporting of selected vehicles in CITI", 2016.
Large Scale Traffic Simulation
One of my main research interest focuses on large scale traffic simulations using machine learning technologies in order to assist traffic planners to evaluate the impact of their modifications in the entire urban traffic system in Sydney.I am currently working with Dr. Yan Xu on the "Sydney City-scale Transport Insights (SCTI)", which is an online platform, which offers up-to-date and full-scale transport insights for a large-scale metropolitan transport system via an evolving map of the latest data. The platform offers three types of transport insights:
- Supply: Insights of the infrastructure and the maintenance works.
- Demand: Insights of the number of journeys made between regions or zones.
- Supply/Demand Interaction: Insights of the transport system’s equilibrium status, bottlenecks, traffic incidents, regional connectivity and users’ reaction to toll prices.
- Data-driven: Insights originated from raw data.
- Full-scale: Insights covering the entire metropolitan transport system.
- Up-to-date: Insights updated every week/month.
3D Traffic Simulation for Eco-neighbourhoods
During my activity in the ERPI Laboratory, I worked on the traffic simulation of a central traffic intersection from down-town Nancy. I was the tutor for a team of five students of ENSGSI Nancy France. The simulation has been done using FlexSim, a 3 dimensional software which offers the possibility of modelling the real-life system according to the real data we have received from the Great Urban Community of Nancy(CUGN).
In June 2013, our 3D traffic simulation project, has won the First prize at the International Competition organized by FlexSIm
with the help of SimConseils.
During this project we have used optimization techniques based on genetic algorithms for choosing the optimal fire plan for the intersection.
The results have been presented at the IFAC World Congress 2014.
In June 2014 we implemented the 3D Simulation of the new Eco-Neighbourhood of Nancy Grand Coeur which is currently under reconstruction.
This work has been presented at the inauguration of the Lorraine Fab Living Lab on the 12th of June 2014.
My collaborators in this project were :
 Mauricio Camargo (Professor ENSGSI Nancy) and
Mauricio Camargo (Professor ENSGSI Nancy) and
 Pascal Lhoste (Professor and Director of ENSGSI Nancy) .
Pascal Lhoste (Professor and Director of ENSGSI Nancy) .
Event-driven control for stochastic switching systems
During my activity as a PhD Student at the Gipsa-laboratory from Grenoble, I have worked on the stochastic switching systems, producing the manuscript : "Probabilistic approach for the event-based control of stochastic switching systems" (french : "Approche probabiliste pour la commande orientée événements des systèmes stochastiques à commutation"). A summary abstract of my thesis is the following:
Hybrid systems are dynamical systems, characterized by a dual behaviour, a continuous interaction between a discrete and a
continuous functioning part. The centre of our work is represented by a particular class of hybrid systems, more specific by the
stochastic switching systems which we model using continuous time Markov chains and differential equations.
The random behaviour of such systems requires a special command which adapts to the arbitrary events that can completely change
the evolution of the system. We chose an event-based control policy which is triggered only when it's necessary
(on an unforeseen event - for example when a threshold that is reached), and until certain functioning conditions are met
(the system returns in the normal state).
Our approach aims to develop a probabilistic model that calculates a performance criterion
(in this case the energy of the system) for the proposed control policy. We start by proposing a discrete event simulation for the
controlled stochastic switching system,which gives us the opportunity of applying a direct optimisation of the control command.
It also allows us to compare the results with the ones obtained by the analytical model we have built when the event-based control is applied.
An analytical model for computing the energy consumed by the system to apply the control is designed by using the exit probabilities of
the control region, respectively, the sejourn times of the Markov chain before and after reaching the control limits.
The last part of this work presents the results we have obtained when computing the performance criterion we have conceived.
If you want more details about this work, please refer to the manuscript here or from the Publications list.
My former supervisors are :
 Stéphane Mocanu (Associate Professor INPG)
and
Stéphane Mocanu (Associate Professor INPG)
and  Hassane ALLA. (Professor UJF Grenoble)
Hassane ALLA. (Professor UJF Grenoble)
Home-care platform for elder monitoring
During the final project of my engineering studies, I had the chance to work as an Erasmus student as the Gipsa-lab, on the project : "Home support for elderly people: Statistical inference of sensor data monitoring activity".
In the city of Grenoble, the TIMC- IMAG laboratory, in collaboration with the Charles Foix d'Ivry-sur-Seine hospital and the CHU from Toulouse,
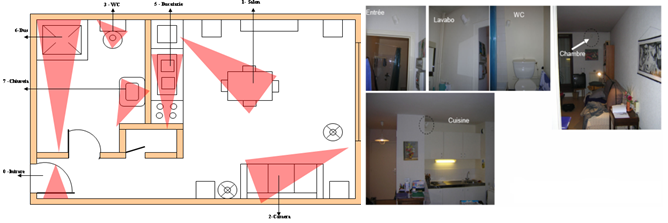
have developed an intelligent habitat, named AILISA. The project has equipped in 2004 two apartments of the Notre Dame building, in the city of Grenoble,
in order to build and to test health platforms which are meant to evaluate the activity of elder persons living alone in their apartments.
The apartments have been equipped with passive infra-red sensors, placed in specific chosen spots which could trace the daily activity of the elders: sleeping, eating, bathing, etc.
Our work contained various phases: applying data processing on the data we have received from TIMC, constructing methods for filtering the less important activities during one day (extended afterwards to
longer periods), and modelling the stochastic behaviour of the person using Continuous-time Markov Chains which would allow us to determine the mean duration of the activities,
as well as characterizing the sequence of activities.
My supervisor for this project were Stéphane Mocanu and Alexia Gouin.
For more details on this work, please refer to the manuscript in the Publications list. .
